when online refinement start working, the lidar lost direction #43
Comments
|
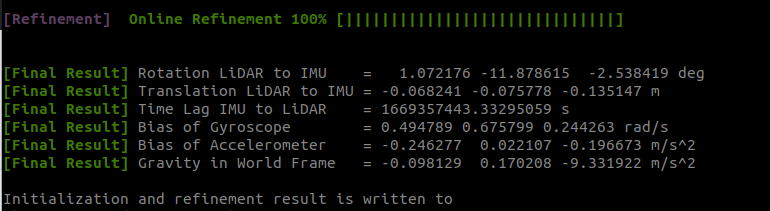
After using Livox_ros_lidar modified by your team. "Time Lag IMU to LiDAR " seems to be okay while the result is still so bad. result: |
|
|
I set 9.805 for sure |
I recommend verifying the output data of your external IMU, to see if the acceleration and gyroscope are normal. The calibrated gyroscope bias seems abnormal. |
|
It seems work fine as usual until X Y Z get 100% to online refinement. And then the lidar do that confusing rotation
It seems work fine as usual until X Y Z get 100% to online refinement. And then the lidar do that confusing rotation. I will try it with other IMU. |
Or you can share a bag by uploading it to onedrive and then give me a link. |
lidar topic: /livox/lidar |
|
The angular velocity of your bag is too large, I guess it's because the unit is degree/s but our code needs rad/s. By converting the input angular velocity to rad/s, the calibration is OK. Converting degree/s to rad/s: Result: 111-2022-11-25_18.39.06.mp4 |
That solved this problem. Thanks to you zfc helping me out. ps: |
|
Hello, can you share the laserMapping.cpp file, I tried to add the lines to pass to rad/sec but I get the same error as you at the beginning. |
can u just post your code( executed function) here? My .cpp file dropped long time ago. |
|
@Marshall-Hu Hi,could you tell me the avia calibration parameter which you get with the built-in IMU? Thank you very much. I get the parameters I got are not consistent with the avia documentation. |
IMU 坐标原点 O' 在点云坐标系 O-XYZ 上的坐标为(-41.65,-23.26,28.40)(单位:mm)。https://terra-1-g.djicdn.com/65c028cd298f4669a7f0e40e50ba1131/Download/Avia/Livox%20Avia%20用户手册中文.pdf |
|
你是外置imu还是怎么,这个值可以拿来做参考啊,不会一样的。但如果差的很多我感觉,可以检查下xyz轴是不是朝向一致的 |
|
没明白,你要跑自己的bag包才能有自己的imu和lidar的转换关系。你跑作者的出来也是他搭建的设备的标定结果。 假如你直接用avia和内置其内置的imu的bag包出来的标定,也不会和手册一样的。 |
|
我是自采了bag包,但结果不对,所以用了下作者上传的用avia和其内置IMU采集的bag包进行验证,发现都与手册相差很多。想验证下这个标定精度能有多高,谢谢您的耐心解答,再次感谢! |
|
现在这个代码是不是优化了?是不是已经删除了,我并没有找到里面有这三行代码 |
Thank you so much for your suggestion! I applied the method you provided, and it successfully resolved this trouble. I really appreciate your help! |
Thanks your nice work. I get some confused thing when I try myself IMU.
I try run this code with Avia Lidar with internal IMU. That is works fine.
When I change imu topic to my external IMU. It seems works well when Init and move around Lidar. When the online refinement Or switch to FastLIO, it jusr break up. There is a video and result image:
1.mp4
The text was updated successfully, but these errors were encountered: